§ 3. Pin-hole Camera Geometry
The pin-hole camera is described by its optical centre
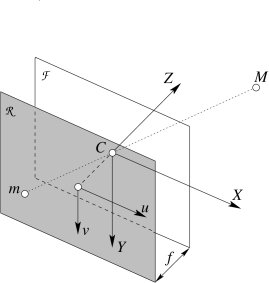
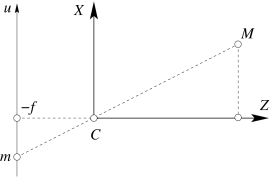
A 3-D point is projected onto the image plane with the line containing the point and the optical centre (see Figure 2).
Let the centre of projection be the origin of a Cartesian coordinate
system wherein the
By similar triangles it is readily seen that the 3-D point
§ 3.1. The camera projection matrix
If the world and image points are represented by homogeneous vectors, then perspective projection can be expressed in terms of matrix multiplication as
| (3) |
The matrix describing the mapping is called the camera
projection matrix
Equation (3) can be written simply as:
| (4) |
where
The projection matrix
§ 3.1.1. General camera: bottom up approach
The above formulation assumes a special choice of world coordinate system and image coordinate system. It can be generalized by introducing suitable changes of the coordinates systems.
Changing coordinates in space is equivalent to multiplying the matrix
| (5) |
The rows of
Changing coordinates in the image plane is equivalent to multiplying
the matrix
| (6) |
It depends on the so-called intrinsic parameters:
-
focal distance
-
principal point (or image centre) coordinates
-
width (
-
angle
The ratio
Thus the camera matrix, in general, is the product of three matrices:
| (7) |
In general, the projection equation writes:
| (8) |
where
Note that, except for a very special choice of the world reference
frame, this “depth” does not coincide with the third coordinate
of
§ 3.1.2. General camera: top down approach
If
In this case we can also write:
| (9) |
where
In general, the camera projection matrix is a
Using QR factorization, it can be shown that any
| (10) |
(
§ 3.2. Camera anatomy
§ 3.2.1. Projection centre
The camera projection centre
| (11) |
where
After solving for
| (12) |
where the matrix
§ 3.2.2. Depth of a point
We observe that:
| (13) |
In particular, plugging Eq. (10), the third component of this equation is
where
If
§ 3.2.3. Optical ray
The projection can be geometrically modelled by a ray through the optical centre and the point in space that is being projected onto the image plane (see Fig. 2).
The optical ray of an image point
It can be described as a parametric line passing through the camera
projection centre
| (14) |
If
Knowing the intrinsic parameters is equivalent to being able to trace
the optical ray of any image point (with
§ 3.2.4. Image of the absolute conic
We will prove now that the image of the absolute conic depends on the intrinsic parameters only (it is unaffected by camera position and orientation).
The points in the plane at infinity have the form
| (15) |
The image of points on the plane at infinity does not depend on camera position
(it is unaffected by camera translation). The absolute conic (which is in the
plane at infinity) has equation
| (16) |
The conic
Its knowledge allows one to measure metrical properties, such as the the angle between two rays.
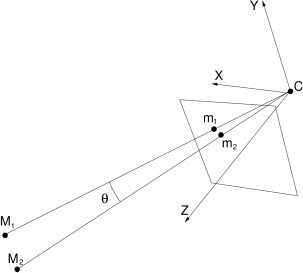
Indeed, let us consider a camera
| (17) |
(it follows easiyl from
§ 3.3. Camera calibration (or resection)
A number of point correspondences
| (18) |
The equation can be rewritten in terms of the cross product as
| (19) |
This form will enable a simple a simple linear solution for
These are three equations in the 12 unknown of
If the data are not exact (noise is usually present) the rank of