Orientamento e nuvola sparsa
La prima fase di ricostruzione 3D, definita "Structure from Motion", tratta tutte le immagini inizialmente caricate in 3DF Zephyr, le orienta e definisce una prima restituzione della scena o del soggetto fotografati, definita nuvola di punti sparsa.
Gli utenti devono definire la Categoria in base allo scenario/soggetto che hanno ripreso e selezionare i Preset in base all'accuratezza e al livello di qualità che desiderano ottenere sul modello 3D.
Dal menù a tendina "Parametri" in alto a destra, è possibile passare alla modalità avanzata selezionando la voce "Avanzati" per definire ogni singolo parametro in modo più dettagliato.
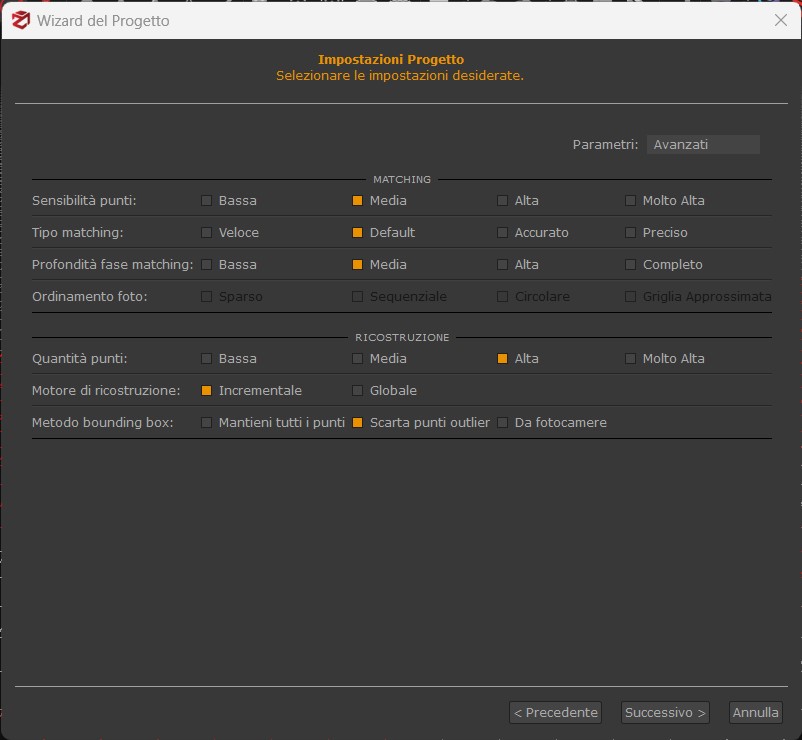
Sensibilità punti: questi punti, definiti "keypoint", rappresentano i punti salienti che vengono individuati sulle immagini. Questo parametro definisce la quantità di punti salienti che 3DF Zephyr dovrà estrarre per ciascuna immagine caricata, tuttavia si sottolinea il fatto che un numero considerevole di keypoint non comporta un risultato migliore, poiché quanti più elementi vengono chiamati in causa, maggiore sarà l'ambiguità in fase di ricerca delle corrispondenze tra i keypoint stessi.
Bassa: estrae fino a 5.000 keypoints per immagine
Media: estrae fino a 7.500 keypoints per immagine
Alta: estrae fino a 10.000 keypoints per immagine
Molto Alta: estrae fino a 15.000 keypoints per immagine
Conviene diminuire la densità dei keypoint quando:
- è necessaria maggiore velocità di calcolo;
- non si sta variando la distanza tra la fotocamera e il soggetto della ripresa;
- le fotografie hanno una buona (almeno 60%) o elevata percentuale di sovrapposizione (70% - 90%);
Conviene aumentare la densità dei keypoint quando:
- le fotocamere non sono state allineate correttamente (controllare l'allineamento delle fotocamere);
- nel dataset sono presenti fotografie molto distanti e molto vicine rispetto al soggetto;
- il dataset è composto da poche foto, che allo stesso tempo godono di una bassa percentuale di sovrapposizione;
- il soggetto della ripresa ha una texture uniforme (ad esempio, un muro bianco);
Tipo Matching: permette di selezionare differenti tipologie di corrispondenza tra i punti salienti nelle diverse immagini. In modalità accurata i tempi di calcolo saranno ovviamente maggiori.
Profondità Fase di Matching: controlla quante corrispondenze tra punti salienti vengono eseguiti sulle immagini. Settando questo parametro al massimo, la possibilità di allineare più immagini contemporaneamente aumenta, al costo di un maggior tempo di computazione.
Conviene diminuire il valore di profondità della fase di matching quando:
- è necessario aumentare la velocità di calcolo;
- la distanza tra fotocamera e soggetto non è elevata;
- le fotografie hanno una buona (almeno 60%) o elevata percentuale di sovrapposizione (70% - 90%);
Conviene aumentare il valore di profondità della fase di matching quando:
- le fotocamere non sono state allineate correttamente;
- nel dataset sono presenti fotografie molto distanti e molto vicine rispetto al soggetto;
- il dataset è composto da poche foto, che allo stesso tempo godono di una bassa percentuale di sovrapposizione;
- il soggetto della ripresa ha una texture uniforme (ad esempio, un muro bianco);
Ordinamento Foto: questo valore suggerisce al software quale movimento è stato impiegato in fase di rilievo fotografico, ossia in quale sequenza sono state scattate le fotografie. In questo modo è possibile velocizzare la procedura di ricerca delle immagini vicine. Con l'ordinamento sequenziale le foto sono state prese seguendo un ordine numerico (foto 1 vicino a foto 2, foto 2 vicino a foto 3 e così via), mentre con circolare si indica una sequenza ad anello. Se si conosce la sequenza delle foto, è possibile snellire il processo di ricostruzione selezionando una di queste due opzioni, altrimenti si può valutare l'opzione sparso. L'ultima voce, griglia approssimata, è stata pensata principalmente per acquisizioni fotografiche da drone o SAPR, e più in generale per situazioni in cui l'acquisizione è sequenziale e gode di una buona percentuale di sovrapposizione tra i singoli scatti fotografici (generalmente compresa tra 70% e 80%).
Quantità punti: questo valore indica il numero di punti per ciascuna fotocamera usati durante il Bundle Adjustment. Più punti considerati possono portare a risultati migliori, ma ad un costo computazionale più alto
Motore di ricostruzione: 3DF Samantha supporta sia la pipeline globale che quella incrementale. La pipeline globale cerca di risolvere globalmente il problema, il quale velocizza l'elaborazione, potenzialmente senza errori di drifting. Dall'altro lato, la pipeline incrementale, nonostante sia più lenta, tende ad orientare più immagini. In poche parole, è consigliabile ricorrere alla pipeline globale se si stanno processando dei dataset molto grandi (dalle 1000 foto in su).
Metodo bounding box: indica il metodo di calcolo della bounding box. E' consigliabile mantenere l'opzione di default "scarta punti outlier", ovvero quei punti "deboli" e lontani che non servono ai fini della ricostruzione.
Una descrizione più approfondita dei parametri è disponibile all'url http://www.3dflow.net/it/3df-zephyr-parameters-tuning-guide/.
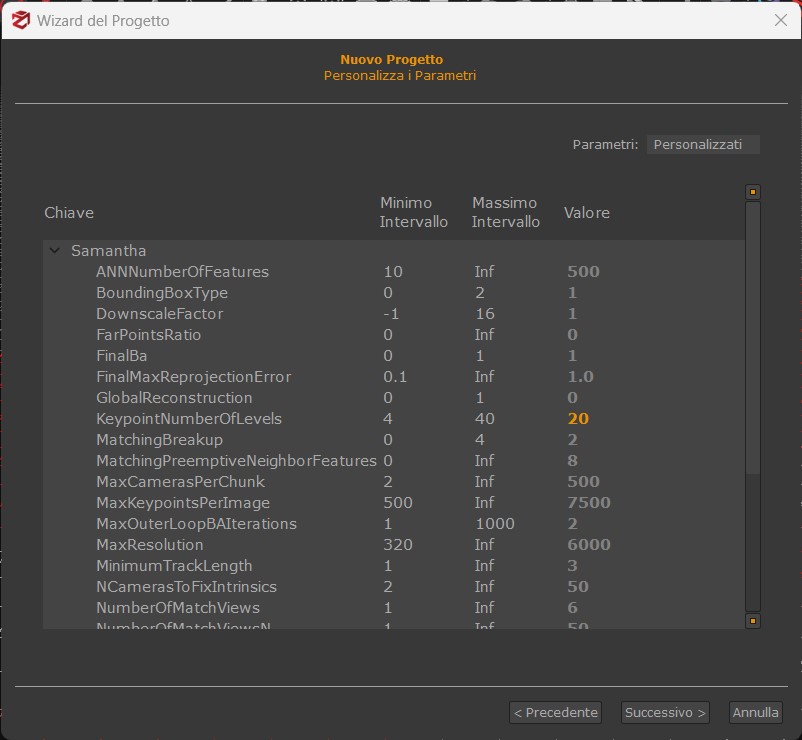
Una terza modalità, sempre dal menu a tendina "Parametri", consente di personalizzare i parametri nei minimi dettagli, selezionando la voce "Personalizzati". Questa modalità è per gli utenti più avanzati. Si ricorda che è possibile reimpostare i valori ai default e caricare file .xml facendo click destro con il mouse e selezionando l'apposita funzione. Da notare come una descrizione dei singoli parametri sia visualizzabile selezionando le singole voci.
Al termine della prima fase di orientamento delle fotocamere verranno visualizzati, all'interno della finestra di rendering, sia la nuvola di punti sparsa che le singole fotocamere nella loro posizione e orientamento al momento dello scatto.
Gli scatti fotografici nella finestra di rendering sono identificati da coni stilizzati di colore blu (default) che proiettano appunto le diverse fotocamere (la cui grafica è modificabile dalle Opzioni nella barra degli strumenti).
COME VALUTARE L'ACCURATEZZA DELLA PRIMA FASE DI ORIENTAMENTO DELLE FOTOCAMERE
Dopo aver terminato la prima fase della ricostruzione 3D è utile osservarne l'accuratezza, in modo tale da capire quali immagini sia necessario scartare al fine di ridurre l'errore anche per le successive fasi.
Cliccando su Strumenti > Spazio di Lavoro > Statistiche fotocamere comparirà la seguente tabella:
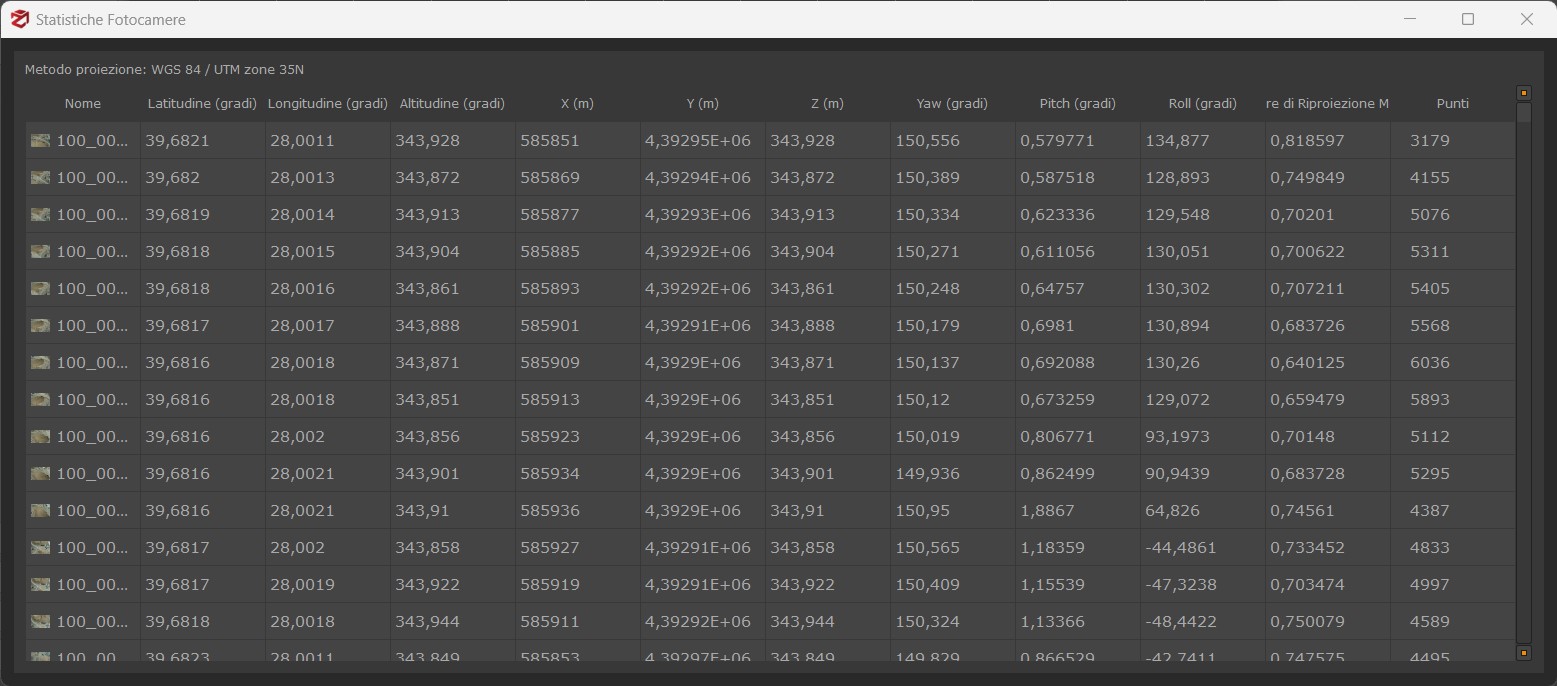
Le due colonne sulla destra mostrano l'Errore di riproiezione medio, riferito ad ogni immagine, e i Punti, ovvero la quantità di punti salienti (i punti di cui è stato possibile ricavarne la posizione nello spazio) individuati su ciascuna fotografia. Cliccando sopra le voci "Errore di Riproiezione Medio" o "Punti" è possibile mettere i valori in ordine crescente o decrescente.
In generale una fotocamera orientata con buona accuratezza avrà un errore di riproiezione basso e molti punti salienti. I punti salienti equivalgono infatti al numero di equazioni utilizzate durante la fase di ricostruzione, quindi un loro numero elevato è di norma correlato a una maggiore affidabilità del risultato. E' anche bene notare che l'errore di riproiezione non fornisce una misura assoluta della bontà del risultato, in quanto deve sempre essere relazionato alla dimensione del sensore e dell'immagine.