Strumenti - Registrazione nuvole di punti
Queste funzioni non sono disponibili in 3DF Zephyr Lite e 3DF Zephyr Free.
Il menu Registrazione consente all'utente di gestire la registrazione delle nuvole di punti. Da questo menu è possibile accedere a:
Registrazione nuvole di punti (ICP)
La funzione Iterative Closest Point (ICP) è un algoritmo che minimizza la differenza geometrica tra due nuvole di punti e genera come output un report delle differenze tra le nuvole di punti.
Questo strumento può essere utilizzato per allineare una nuvola di punti acquisita tramite laser scanner con una nuvola di punti fotogrammetrica, tenendo conto di traslazione, rotazione e scala. Una volta allineata, la scansione laser può essere ulteriormente elaborata, ad esempio strutturata e colorata utilizzando la nuvola di punti fotogrammetrica.
Nota: Se le nuvole di punti sono ancora troppo distanti, lo strumento Gizmo  permette di avvicinarle manualmente prima di procedere con un'altra iterazione ICP.
permette di avvicinarle manualmente prima di procedere con un'altra iterazione ICP.
Registrazione multipla di punti (Multi ICP)
Questa funzione, analoga alla precedente, permette di allineare più nuvole di punti, a patto che esse siano già nella stessa scala, per esempio, più scansioni ottenute da un laser scanner.
Prima di procedere si ricorda che:
- gli oggetti che si desidera registrare siano vicini tra loro
- è possibile utilizzare questo strumento per registrare più oggetti non strutturati con più oggetti strutturati
- il processo di aggiustamento e minimizzazione saranno eseguiti globalmente
- se si desidera applicare un fattore di scala, è consigliabile utilizzare la modalità con due viste ed abilitare la scala.
Nella prima pagina, sarà richiesto di selezionare quali oggetti interagiranno:

Sarà successivamente possibile selezionare l'oggetto di riferimento (che rimarrà fisso). Infine, sarà possibile definire le coppie di oggetti.

Nella maggior parte dei casi le coppie sono computate automaticamente e non dovrebbe essere richiesta nessuna ulteriore interazione da parte dell'utente. Infine, è possibile definire i parametri che definiranno le condizioni di stop della procedura ICP.

Successivamente sarà proposto un riassunto dei parametri impostati e sarà possibile avviare la procedura premendo il tasto di Avvio.
Distanza Rimozione Punti: quando due o più nuvole di punti vengono registrate tramite ICP, ad ogni iterazione vengono calcolati i punti corrispondenti fra le nuvole (poiché servono internamente all'algoritmo di registrazione).
Dato che le nuvole possono rappresentare zone la cui sovrapposizione non è pari al 100%, si deve utilizzare una procedura per rimuovere i punti corrispondenti troppo distanti (che altrimenti porterebbero ad una registrazione errata fra zone che non rappresentano la stessa porzione di oggetto/ambiente).
La soglia per tali corrispondenze può essere calcolata in due modi:
- automatico (tramite un'analisi statistica fra le distanze);
- manuale (si specifica una soglia metrica oltre la quale le corrispondenze vengono scartate);
Confronto nuvole di punti
Questa funzione permette di visualizzare un rapporto relativo alle differenze tra due date nuvole di punti come grafico dei residui. Al di sotto dell'istogramma è possibile osservare i valori di errore medio e varianza. Le impostazioni dello strumento di confronto sono spiegate di seguito:
- Tipo di distanza: indica il tipo di distanza che può essere calcolata, ed è possibile scegliere la distanza tra una coppia di punti o la distanza tra un piano e un punto;
- Distanza massima: indica il valore più alto considerato durante il calcolo dell'istogramma;
- Numero di campioni: determina il numero di colonne dell'istogramma;
In merito al processo di calcolo:
- Si calcola per ogni punto del target il punto più vicino nel modello;
- Se la distanza tra una coppia di punti è maggiore della distanza massima, questa viene esclusa dal conteggio;
- Si conteggia il numero di punti che ricade in un range delle distanza in modo tale da calcolare l'istogramma:
- se i punti si concentrano principalmente nella parte sinistra dell'istogramma, il riferimento e il target sono molto simili;
- se i punti si concentrano principalmente nella parte destra dell'istogramma, il riferimento e il target sono molto diversi;
E' inoltre possibile selezionare una parte dell'istogramma per limitare il numero di punti visualizzati nello spazio 3D in cui si trova una rappresentazione visiva dei punti più vicini e più lontani della nuvola di punti "modello".

Corrispondenza centro oggetti
Questo strumento può essere utilizzato dopo aver generato una nuvola di punti densa e aver importato una scansione laser scanner. Capita spesso infatti che una nuvola laser venga acquisita e salvata in un sistema di riferimento diverso da quello della nuvola di punti fotogrammetrica. Questo spiega come mai a volte gli utenti non riescano a visualizzare una scansione importata all'interno di Zephyr. Lo strumento Corrispondenza centro oggetti permette di traslare la scansione importata, portandola vicino ad un oggetto strutturato, ovvero la nuvola di punti fotogrammetrica. Nello specifico tale strumento agisce sui centri delle due nuvole considerate, allineando i centri.
Registrazione tramite punti di controllo
I Punti di Controllo a Terra (GCP) possono essere utilizzati per pre-allineare una nuvola di punti fotogrammetrica con una nuvola di punti da laser scanner.
Dopo aver importato la scansione laser, il flusso di lavoro richiede di posizionare almeno tre punti di controllo sulla prima nuvola di punti, quindi identificare e applicare gli stessi punti di controllo sulla seconda.
A seconda del flusso di lavoro, è possibile scegliere di spostare la nuvola di punti fotogrammetrica o quella del laser scanner; la procedura è la stessa in entrambi i casi.
Nella scelta delle posizioni dei punti di controllo, tenere presenti le seguenti linee guida:
- Utilizzare elementi ben definiti come spigoli o angoli, che possano essere facilmente e coerentemente identificati in entrambe le nuvole di punti.
- Distribuire i punti su tutti e tre gli assi (X, Y, Z) per garantire un allineamento robusto e accurato.
Nota: i punti di controllo sono raggruppati per Oggetto (nuvola di punti fotogrammetrica/laser scanner) nel pannello "Punti di controllo".

Per la nuvola di punti densa fotogrammetrica, si consiglia di aggiungere i GCP con lo strumento "Da Immagini" per una maggiore accuratezza.

Quando si lavora con una scansione laser non strutturata, i GCP possono essere selezionati direttamente nella vista 3D utilizzando il comando "Scegli".
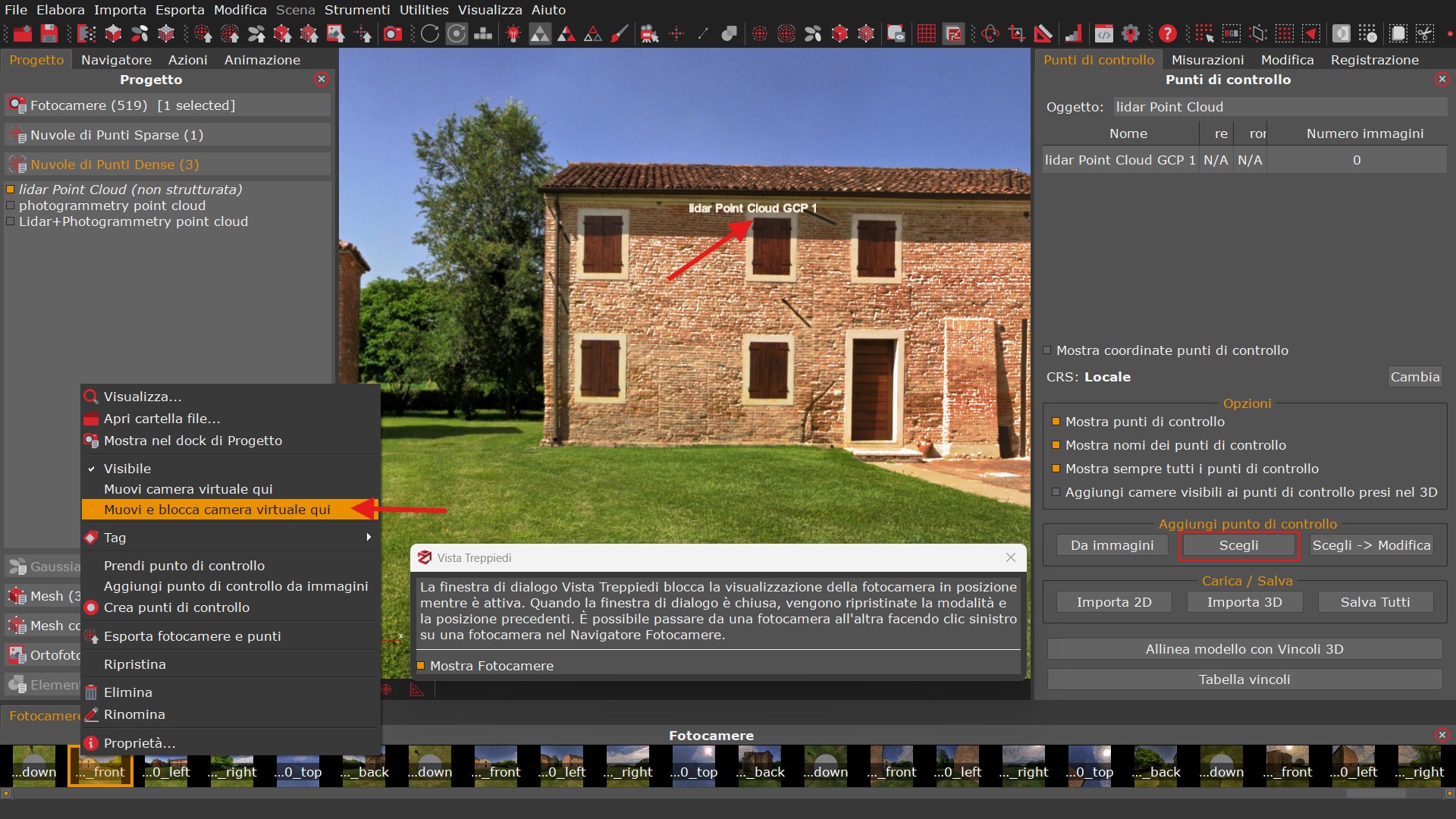
Utilizzare la Vista Treppiedi per definire i Punti di Controllo
Se i dati della vista panoramica sono disponibili nelle scansioni importate, è possibile strutturare prima le scansioni (vedere la sezione Strutturazione dati Laser Scan) e poi utilizzare la vista panoramica per posizionare i Punti di Controllo (GCP) con maggiore accuratezza.
Nel Navigatore Fotocamere, selezionare l'immagine desiderata, quindi premere Click-destro destro per visualizzare l'opzione "Muovi e blocca camera virtuale".
La finestra di dialogo Vista Treppiedi blocca la vista della fotocamera finché è attiva. Quando la finestra viene chiusa, vengono ripristinati la modalità e la posizione precedenti della fotocamera. Per passare da una fotocamera all'altra, fare clic-sinistro sulla fotocamera desiderata nel Navigatore Fotocamere.
Nel pannello Punti di Controllo, i GCP possono essere selezionati direttamente sulla Vista Treppiedi abilitando il pulsante "Scegli".
Una volta posizionati tutti i punti di controllo, selezionare Strumenti > Registrazione > Registrazione per punti di controllo.

Selezionare quale sarà l'oggetto di riferimento e quale sarà l'oggetto che verrà mosso.

Utilizzare il bottone “Aggiungi vincolo” per selezionare le coppie di punti di controllo. Sono richiesti almeno tre vincoli.

Una volta pronti, selezionare “Successivo” per procedere al riepilogo e successivamente premere “Applica” per avviare la computazione.

A questo punto, le nuvole di punti sono state allineate correttamente. Si consiglia di eseguire un'ulteriore allineamento tramite ICP per minimizzare gli errori.
Strutturazione dati laser scan
Una volta completato il procedimento di registrazione nuvole di punti, si può procedere con la strutturazione delle scansioni laser. E' sufficiente selezionare la nuvola di punti desiderata dal tab "Progetto" con il tasto destro e cliccare "Rendi strutturata". Selezionare successivamente le opzioni in base alle proprie esigenze, come mostrato di seguito:

Dopo la strutturazione delle scansioni, si può procedere con la generazione della mesh. E' opportuno scegliere correttamente il numero di punti sorgente da questa finestra di dialogo in base al grado di dettaglio che si vuole ottenere poi nella mesh.