Fotogrammetria + LiDAR con il DJI Zenmuse L1
Fotogrammetria Aerea, modulo LiDAR, Mapping, Rilievo con Drone
I dati del seguente caso studio sono stati gentilmente forniti da Simone Dall’Asta di DL Droni, azienda italiana che si occupa principalmente di effettuare rilievi aerei in svariati settori, tra i quali l’ispezione di infrastrutture e parchi fotovoltaici, l’agricoltura di precisione e l’analisi ambientale.

Simone ha recentemente effettuato dei rilievi con il drone DJI Matrice 300 RTK equipaggiato con la tecnologia Zenmuse L1, la prima soluzione di casa DJI che integra insieme dati RGB + modulo LiDAR per una precisione ottimale della nuvola di punti e della mesh 3D finale, con il dettaglio fotorealistico ottenuto dalla fotogrammetria.
In questo articolo mostreremo dunque i diversi step del workflow da utilizzare in 3DF Zephyr.
Panoramica del rilievo
Il rilievo mostrato di seguito è stato eseguito lo scorso novembre 2021 durante una giornata nuvolosa sopra un piccolo paese che si trova in provincia di Cremona, Lombardia. Il dataset, trattandosi per lo più di un test per capire le funzionalità del LiDAR L1, comprende solamente 211 foto nadirali in formato JPG con sovrapposizione al 50%, più la scansione laser in formato .las. Il Matrice 300 RTK era agganciato alla rete GNSS di HxGN SmartNet per garantire una migliore determinazione in tempo reale della posizione del drone; la missione è stata programmata ad un’altezza di 60 metri con impostazione “triplo eco ripetitivo” attivata, per un tempo totale di volo di 11 minuti (con calibrazione IMU L1 automatica ad inizio e termine missione).
I parametri scelti per l’acquisizione fotografica sono i seguenti:
- Tempo di esposizione: 1/30 secondi
- Apertura diaframma: f/2.8
- ISO: tra 160 e 320
Qui sotto è possibile visualizzare la deviazione RTK del volo (Fig. 1):
Flusso di lavoro in 3DF Zephyr
Una volta raccolti tutti i dati, il primo step è stata la generazione del modello 3D a partire dai dati fotogrammetrici in una sessione di 3DF Zephyr. Una completato e salvato il progetto fotogrammetrico, si è importato il file .las del LiDAR in un’altra sessione al fine di utilizzarlo come modello di riferimento per l’integrazione fotogrammetria + laser scanner.
Per fare ciò, è stato sufficiente importare e unire il progetto .zep fotogrammetrico con il progetto contenente il file .las mediante l’opzione di “Unione diretta” presente nel dialog che si apre automaticamente durante la fase di importazione.
Come si può notare dallo screenshot sottostante (Fig. 2), le due tipologie di dati si trovano nello stesso sistema di riferimento; pertanto, si può procedere direttamente alla fase di strutturazione della nuvola di punti da laser scanner mediante click destro su di essa nel tab di Progetto.
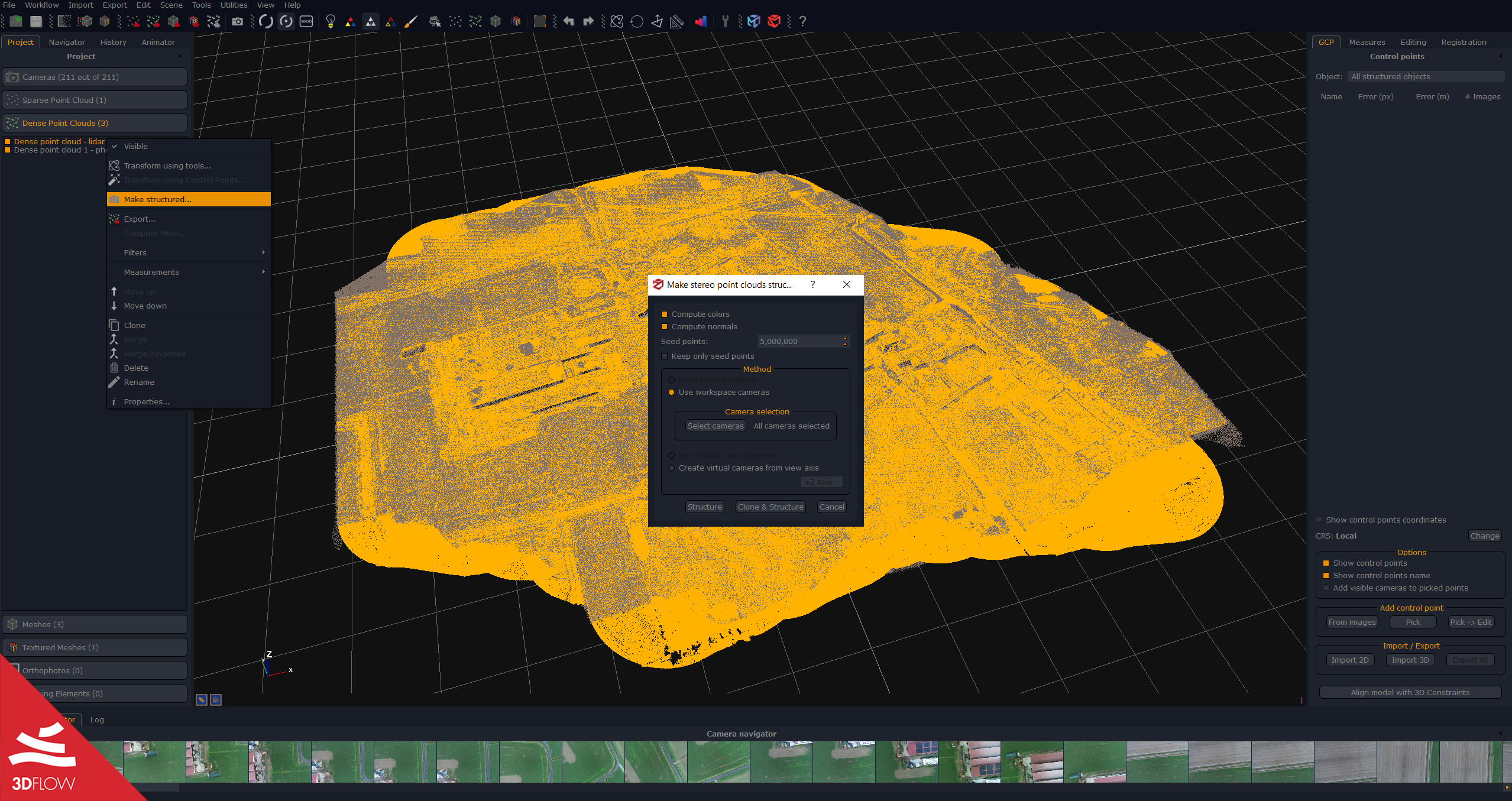
NB: per poter “colorare” la scansione laser con il dato RGB delle foto, è necessario strutturarla utilizzando le camere dello spazio di lavoro, come mostrato sopra. Questo passaggio fondamentale porta la scansione a comportarsi come una normale nuvola di punti fotogrammetrica (Fig. 3) e permette quindi di procedere con le fasi successive della ricostruzione 3D, ovvero la generazione mesh e mesh con texture.

Outputs e considerazioni finali
L’ultima fase di generazione mesh con texture – usando i preset “Generico – Dettagli Elevati” – ha estratto una mesh con 10,559,890 triangoli e 6,534,960 punti.
Considerando il numero esiguo di fotografie rispetto all’area rilevata, il risultato finale, soprattutto a livello di precisione geometrica, ha totalmente soddisfatto le aspettative. Per questa tipologia di rilievo aereo con scenario urbano, aumentare il numero di foto (e quindi la percentuale di sovrapposizione tra esse) riuscendo ad effettuare prese sia nadirali che oblique, andrebbe ad aumentare a sua volta il livello di dettaglio fotorealistico, specialmente per quanto riguarda i muri laterali degli edifici.
Di seguito vi sono gli screenshot della mesh finale – rispettivamente geometria e texture (Fig. 4).


Fig. 4. Mesh finale, geometria (sx) e texture (dx). ©DL Droni