La Pagoda “Cheongnaru” (“청라루”) di Cheongna Lake Park, Incheon, Corea del Sud
Fotogrammetria Aerea, Rilievo con Drone, RTK, UAV, Mapping
I dati del seguente caso studio sono stati gentilmente forniti dal nostro rivenditore Coreano Koseco, azienda che opera nel settore mapping e che offre sevizi di rilievo aereo con droni e soluzioni hardware e software.
![]()
Il soggetto del rilievo – e del nostro caso studio – è la cosiddetta Pagoda “Cheongnaru“, un edificio tradizionale Coreano situato nella zona nord del Parco del Lago Cheongna a Incheon, Corea del Sud.
La Pagoda Cheongnaru (“청라루”)
Il Parco del Lago Cheongna comprende quattro aree principali: l’area Ecologica, della Tradizione, dello Svago, e dell’Arte. Questa piccola pagoda si trova nella zona della Tradizione grazie alla sua architettura unica e senza tempo (Fig. 1). Per questo motivo, il gruppo dei periti di Koseco ha voluto rilevare e ricostruire l’edificio utilizzando l’approccio fotogrammetrico, con l’obiettivo di estrarre un modello 3D in alta risoluzione da utilizzare a scopi promozionali ma che, allo stesso tempo, potesse offrire ai loro clienti un perfetto richiamo alla storia e alla tradizione Coreane.
Non c’è da stupirsi inoltre che il Parco del Lago Cheongna sia diventato negli anni un luogo piuttosto famoso in Corea del Sud, essendo stato scelto come set per il K-drama intitolato “Goblin: The Lonely and Great God”, andato in onda dal 2016 al 2017 e che si trasformò ben presto in un vero e proprio fenomeno culturale nel paese.
Il rilievo aereo
il rilievo è stato effettuato utilizzando la fotocamera full-frame Zenmuse P1 da 45 MP montata sul drone DJI Matrice 300 con tecnologia RTK. Come prima cosa, hanno eseguito una missione di volo automatica (mediante l’opzione “Smart Oblique” fornita da DJI) per coprire l’intera area d’interesse; in seguito, sono passati al volo in manuale per raccogliere maggiori dettagli e scattare delle foto close-up utili a ricostruire i caratteristici motivi architettonici presenti tutt’attorno alla pagoda.
Durante la fase di acquisizione fotografica, hanno scattato un totale di circa 3600 immagini in formato JPG. Non è stato posizionato alcun GCP sulla scena dal momento che, per questo rilievo, non vi era necessità di scalare il modello 3D. In ogni caso, il modulo RTK garantisce un buon livello di precisione anche senza l’utilizzo di punti di controllo a terra.
Risultati, specifiche PC e Impostazioni utilizzate
Tutti i dati raccolti sono stati importati in 3DF Zephyr 6.503 installato su un computer con le seguenti specifiche:
- Mainboard: GIGABYTE X570 AORUS PRO WIFI
- Processore: AMD Ryzen 5950x
- RAM: G. SKILL DDR4-3800 CL18 TRIDENT Z NEO (64GB)
- SSD: Samsung 970 EVO Plus M.2 2280 (1TB)
- Scheda grafica: Nvidia Geforce RTX 3090 VISION OC D6X 24GB
Una volta terminata la fase di Structure from Motion, 3418 foto sono state orientate e aggiunte allo spazio di lavoro. Nella tabella sottostante è possibile visualizzare i diversi output generati con Zephyr, i preset utilizzati e i tempi di processamento:
| Step Ricostruzione 3D | N. di punti / triangoli | Impostazioni usate | Tempistiche |
| Nuvola Sparsa | 851,711 punti | Ambiente Urbano / Dettagli Elevati | 2h 33m 47s |
| Nuvola Densa | 13,015,982 punti | Ambiente Urbano / Dettagli Elevati | 21h 46m 49s |
| Mesh | 25,795,188 triangoli | Ambiente Urbano / Dettagli Elevati | 17h 38m 17s |
| Mesh con texture (solo pagoda) | 20,074,275 triangoli | Generico / Dettagli Elevati | 6h 3m 50s |
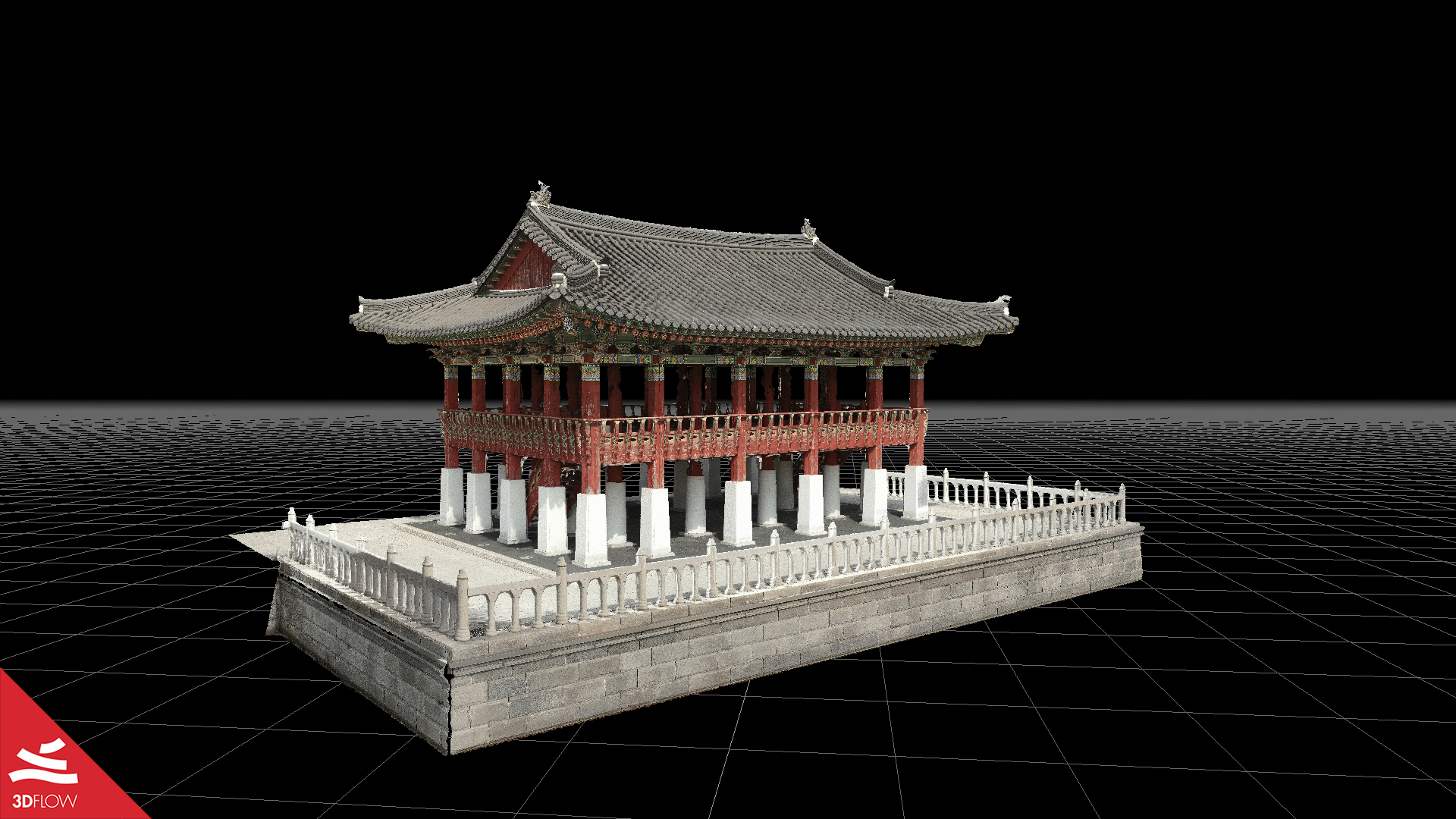
Come già anticipato, lo scopo finale era quello di estrarre una mesh con texture in HD della pagoda come mostrato negli screenshot qui di seguito:
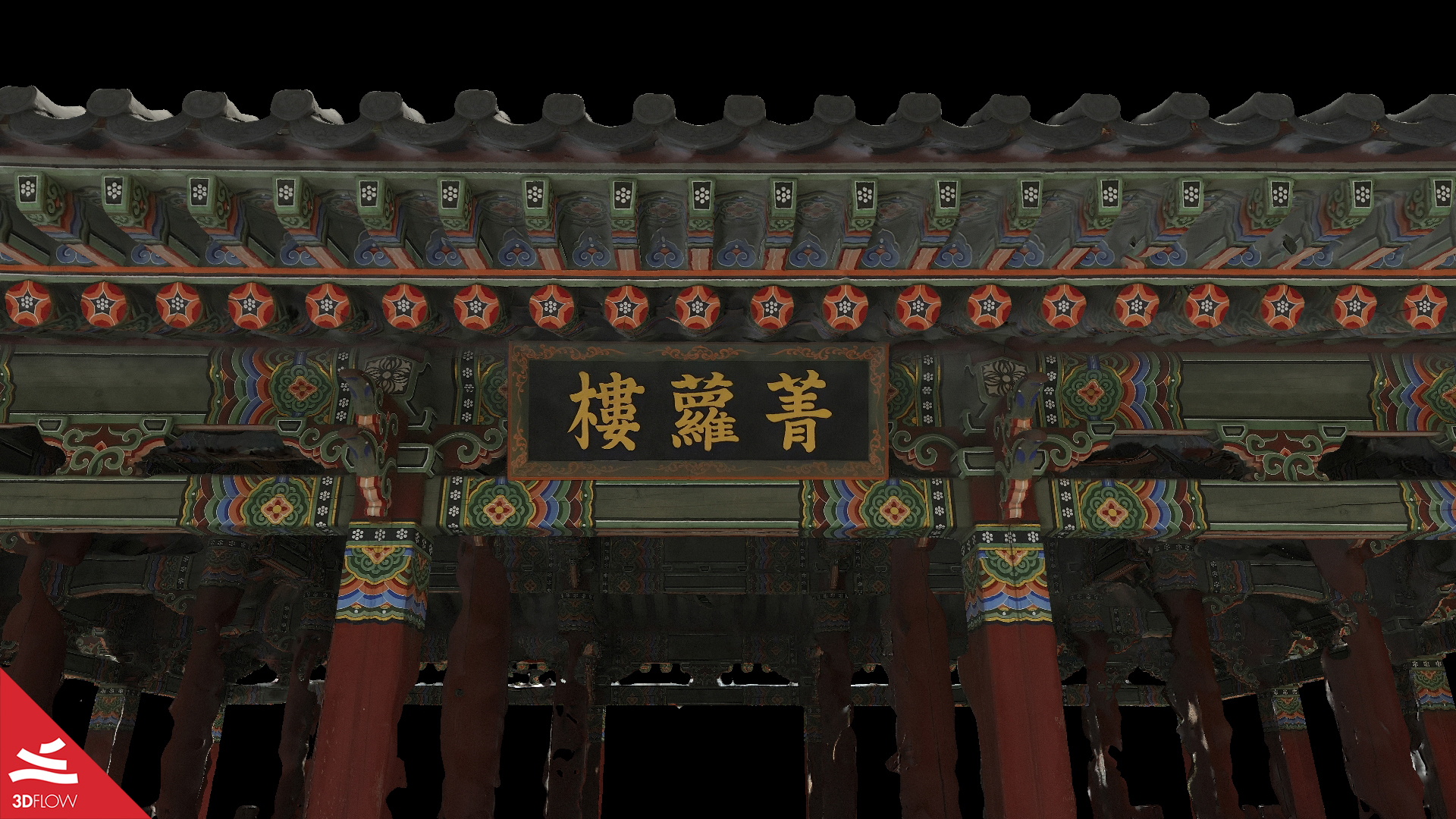


Fig. 3-4. Mesh finale, geometria (sx) e texture (dx). ©Koseco
Guarda qui il video che mostra la nuvola di punti densa, la geometria della mesh e la mesh texturizzata create con 3DF Zephyr.