The Cheongnaru Pavilion (“청라루”) in Cheongna Lake Park, Incheon, South Korea
Aerial Photogrammetry, Drone Survey, RTK, UAV, Mapping
The data of the following case study were kindly provided by our Korean reseller Koseco, company operating in the mapping field by providing aerial drone survey services and hardware/software solutions.
![]()
The survey target – and subject of this case study – is the so-called “Cheongnaru Pavilion“, a Korean traditional building located on the north side of Cheongna Lake Park, a public park located in Incheon, South Korea.
The Cheongnaru Pavilion (“청라루”)
The Cheongna Lake Park consists of four main zones: Eco, Traditional, Leisure, and Art. This small pavilion is located in the Traditional zone due to its unique and timeless architecture (Fig. 1). For this reason, Koseco surveyors wanted to retrieve and reconstruct the building via the photogrammetric approach, in order to extract a high-resolution 3D model to use for promo purposes while also delivering for their customers a perfect reference of those ancient vibes steeped in Korean history.
Other than that, it’s no surprise that Cheongna Lake Park has progressively become a quite famous place in South Korea since it’s been chosen as the set of the fantasy K-drama titled “Goblin: The Lonely and Great God”, which aired between 2016 and 2017 and quickly turned into a cultural phenomenon in the country.
Survey overview
The survey was carried out using the 45 MP full-frame camera Zenmuse P1 equipped on the drone DJI Matrice 300 with RTK technology. The first auto-flight mission (the “Smart Oblique” capture option provided by DJI) covered the whole target area. The manual flight was set afterward in order to get close-up images of the pavilion’s architectural motifs.
During the photo acquisition around 3600 JPG pictures were collected. No GCPs were leveraged on the scene as scaling was not the primary goal this time. However, the RTK coordinates in the pictures’ Exif data already provided a good accuracy level regardless of the usage of GCPs.
Outputs, PC specs and settings used
Data were imported into 3DF Zephyr 6.503 on a computer with the following specifications:
- Mainboard: GIGABYTE X570 AORUS PRO WIFI
- CPU: AMD Ryzen 5950x
- RAM: G. SKILL DDR4-3800 CL18 TRIDENT Z NEO (64GB)
- SSD: Samsung 970 EVO Plus M.2 2280 (1TB)
- GPU: Nvidia Geforce RTX 3090 VISION OC D6X 24GB
After the first Structure from Motion phase, 3418 images were oriented and added to the workspace. Here in the table below you can see all the outputs generated with Zephyr, the presets used, and the processing times:
| Steps 3D reconstruction | N. of points / triangles | Settings used | Processing times |
| Sparse point cloud | 851,711 points | Urban / High Details | 2h 33m 47s |
| Dense point cloud | 13,015,982 points | Urban / High Details | 21h 46m 49s |
| Mesh | 25,795,188 triangles | Urban / High Details | 17h 38m 17s |
| Textured mesh (pavilion only) | 20,074,275 triangles | General / High Details | 6h 3m 50s |
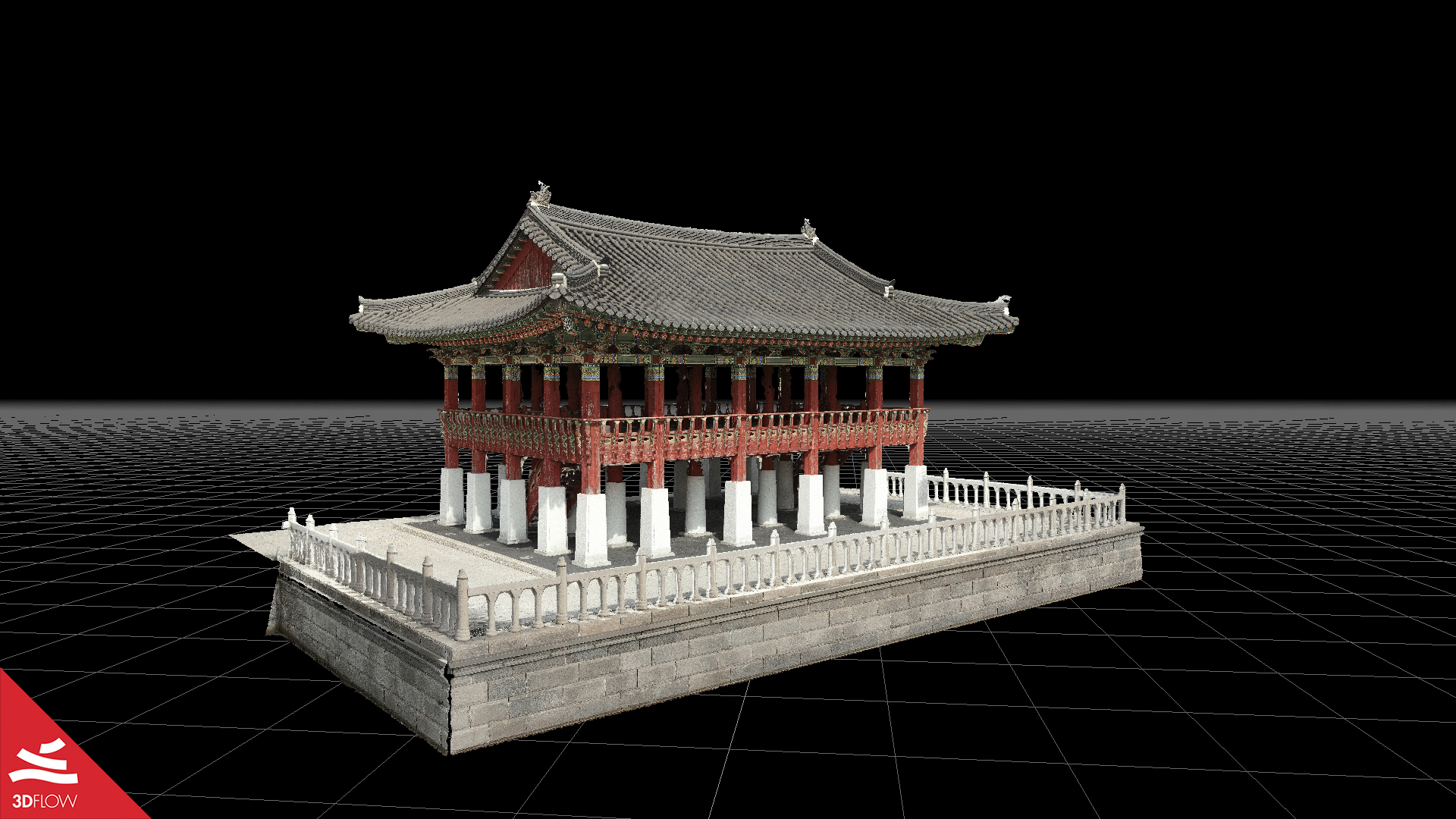
As previously mentioned, the final goal was to extract an HD textured mesh of the pavilion as shown in the following screenshots:
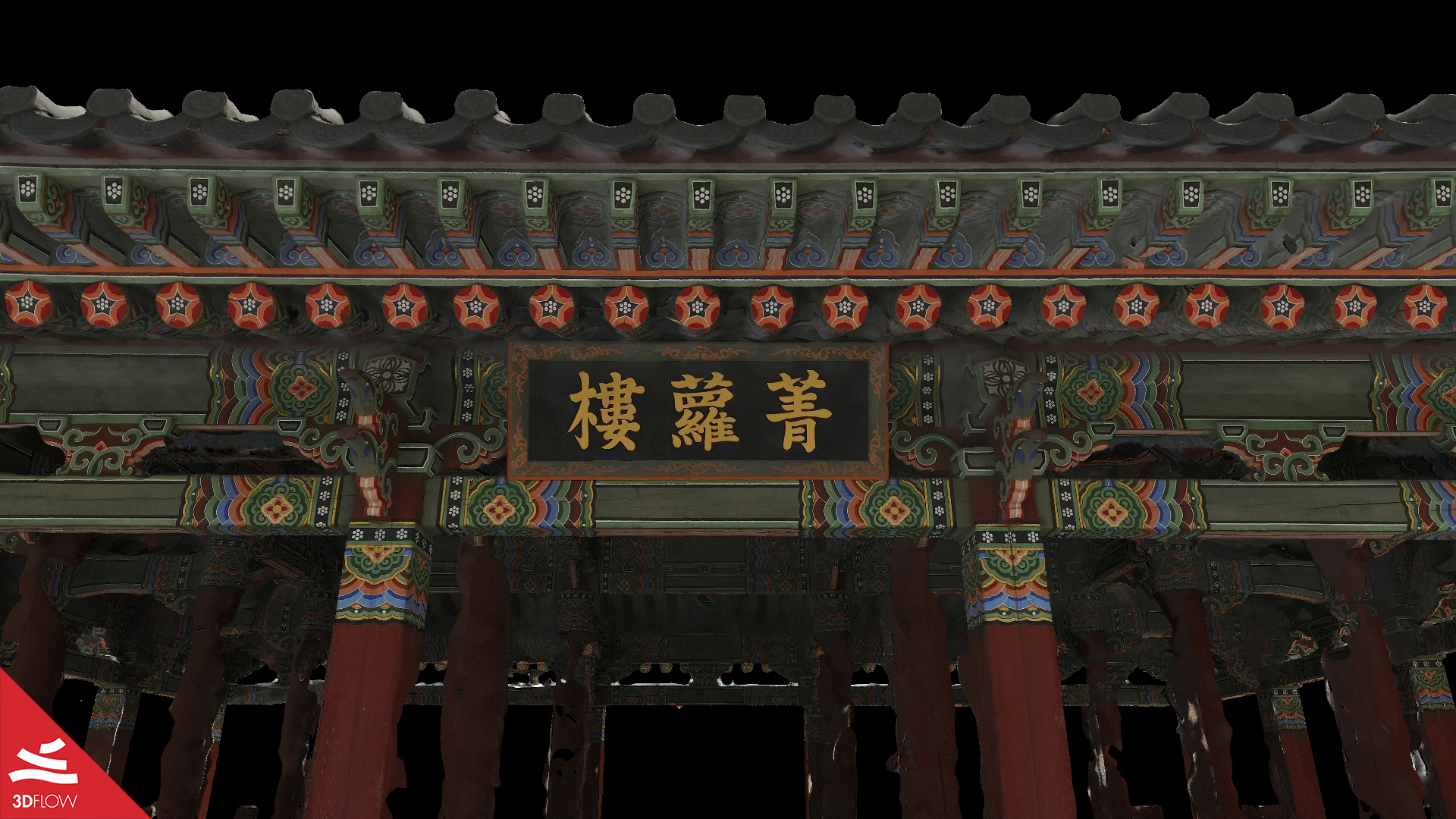


Fig. 3-4. Final mesh, geometry (left) and texture (right). ©Koseco
Watch here below the video that shows the dense point cloud, mesh geometry, and texture made with 3DF Zephyr.