Tutorial #A11 – Configurazioni a fotocamere fisse
Configurazioni a fotocamere fisse
Benvenuti nella serie di tutorial di 3DF Zephyr.
In questo tutorial imparerai il flusso di lavoro per configurazioni a fotocamere fisse.
Con questo flusso di lavoro potrai calibrare la tua configurazione per esportare i parametri interni ed esterni di tutte le fotocamere in modo da poter creare velocemente un nuovo spazio di lavoro senza dover computare più volte l’orientamento delle fotocamere. Questo ovviamente implica che tutte le fotocamere non vengano mai spostate.
Introduzione
Perchè utilizzare questo flusso di lavoro? Sebbene non sia obbligatorio, seguendo questo flusso di lavoro verranno saltate la maggior parte delle fasi SfM ogniqualvolta andrete a generare un nuovo dataset con lo stesso setup fisso. Questo vi consentirà di risparmiare la maggior parte tempo durante la generazione della nuvola sparsa (per esempio il calcolo dei punti salienti dovrà comunque essere eseguito).
Questo flusso di lavoro implica che tutte le fotocamere non vengano mai mosse. Per questo esempio, utilizzeremo il dataset Richard di Pi3dScan – puoi scaricarlo dalla homepage di Pi3DScan o qui sotto :
 | Download Dataset – Richard di Pi3dScan (670MB) |
Passo 1 – Creazione di un nuovo progetto / calibrazione
Create un nuovo progetto secondo la solita procedura, in questo esempio utilizzando le immagini nella directory “153894_with projection”, tuttavia nella pagina della calibrazione fotocamere esegui click destro sulla lista di fotocamere e successivamente clicca su “Seleziona tutto (1)“. Esegui nuovamente click destro e seleziona “Clona calibrazioni (2)“.
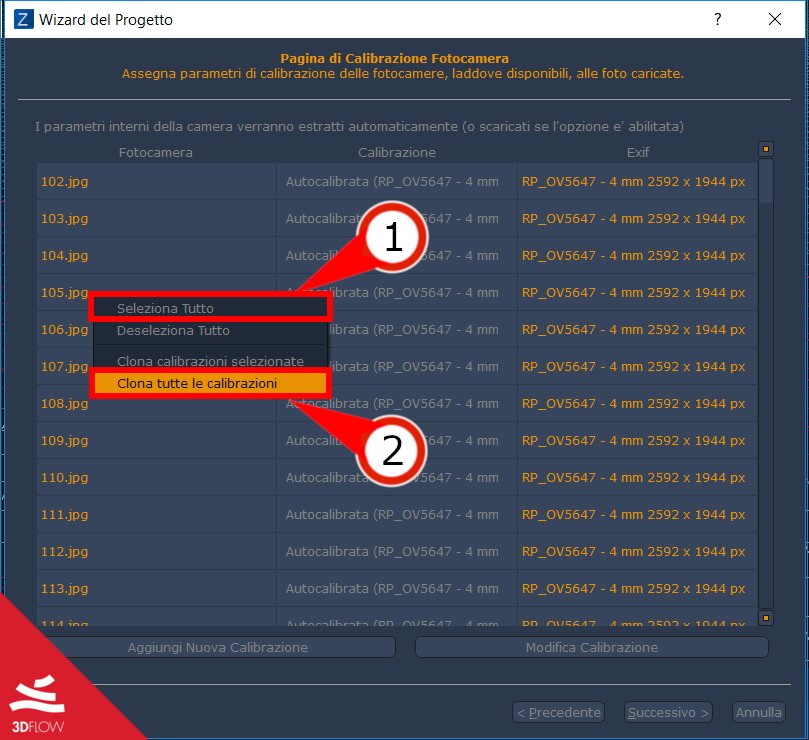
Noterai che ogni riga della tabella verrà cambiata da “autocalibrata” al nome della fotocamera.
Dalla versione 3.701 è in alternativa possible eseguire click destro e selezionare “clona tutte le calibrazioni”.
Una volta generata la nuvola di punti sparsi, potrai esportare i parametri intrinseci ed estrinseci come file .xmp dal menu “Esporta” -> “Esporta fotocamere e punti” assicurandoti di selezionare “esporta intrinseci ed estrinseci come file xmp“.
A questo punto potete decidere di procedere lungo il processo di ricostruzione o utilizzare un dataset differente. Per lo scopo di questo esempio, inizieremo un nuovo progetto usando le foto nella directory “153894_for texture”.
Protip: se avete un dataset acquisito da rig con un proiettore, è consigliabile utilizzare le immagini con il pattern proiettato fino alla generazione della mesh (inclusa) e cambiare le fotografie con il comando “Strumenti -> Spazio di lavoro -> Cambia fotografie” usando quelle senza proiettore solo per la texture.
Protip: Dalla versione 3.700, 3DF Zephyr offre un processo semplificato basato su file XMP.
Passo 2 – Creazione di un nuovo progetto utilizzando le informazioni precedentemente salvate delle fotocamere
Copiate i file xmp generati nella directory del progetto (in questo esempio “153894_for texture”). Dal menu “File” selezionate “Carica fotografie con parametri noti” e selezionate le fotografie normalmente. A questo punto il wizard salterà la pagina di calibrazione e nel riassunto dovreste visualizzare “fixed camera ppm loaded” prima dell’avvio della ricostruzione.
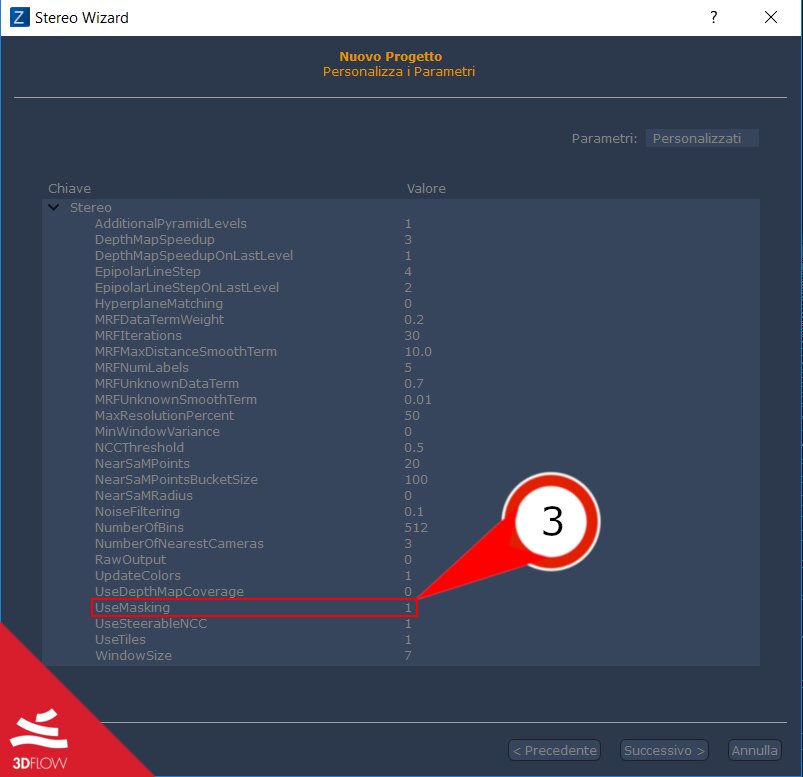
Si prega di notare che per poter caricare maschere nelle fasi successive (per esempio nel calcolo di una nuvola di punti densa) dovrete selezionare Strumenti -> Workspace -> Cambia maschere – inoltre, se state usando la modalità personalizzata, assicuratevi di avere impostato “1” nell’apposito parametro ( UseMasking (3) )
Note finali
In questo specifico esempio, il flusso di lavoro corretto sarebbe stato di procedere fino alla generazione della mesh utilizzando le immagini nella directory “153894_with projection” e successivamente utilizzare le fotografie senza proiezione solo per la generazione della texture.
E’ importante capire quando il cambio di immagini per texture può essere fatto come step finale, mentre il caricamento di foto con parametri noti sia da utilizzare per dataset completamente diversi ottenuti con lo stesso setup fisico di fotocamere.